- Memahami prinsip dasar input dan output pada mikrokontroler.
- Mampu memahami kontrol greens house berbasis sensor
- Mampu memahami simulasi proteus yang dihubungkan kedalam proteus
- Power Supply

- Motor DC

- Arduino Uno

- Button

- LDR
.jpg)
.jpg)
- LM35

- Resistor

- Relay
.jpg)
- ULN2003A

- L2993D

- LED
.jpg)
- Motor DC
Motor terdiri atas 2 bagian utama yaitu stator dan motor. Pada stator terdapat lilitan (winding) atau magnet permanen, sedangkan rotor adalah bagian yang dialiri dengan sumber arus DC. Arus yang melalui medan magnet inilah yang menyebabkan rotor dapat berputar. Arah gaya elektromagnet yang ditimbulkan akibat medan magnet yang dilalui oleh arus dapat ditentukan dengan menggunakan kaidah tangan kanan.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:• Tegangan dinamo : meningkatkan tegangan dinamo akan meningkatkan kecepatan• Arus medan : menurunkan arus medan akan meningkatkan kecepatan.Mekanisme Kerja Motor D
Mekanisme kerja untuk seluruh jenis motor secara umum sama


- Arus listrik dalam medan magnet akan menimbulkan gaya.
- Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran/loop, maka kedua sisi loop yaitu pada sudut kanan medan magnet akan mendapat gaya pada arah yang berlawanan.
- Pasangan gaya menghasilkan torsi untuk memutar kumparan.
- Motor- motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putar yang lebih seragam dari medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan
Resistor
Resistor memiliki nilai resistansi atau hambatan yang berfungsi untuk menghambat dan mengatur arus listrik yang mengalir dalam rangkaian. Resistor memiliki dua pin untuk mengukur tegangan listrik dan arus listrik, dengan resistansi tertentu yang dapat menghasilkan tegangan listrik di antara kedua pin. Nilai tegangan terhadap resistansi berbanding lurus dengan arus yang mengalir.

Spesifikasi: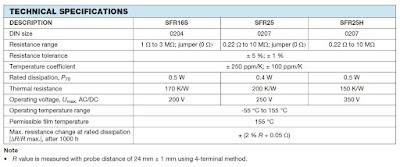




LED
Light Emitting Diode atau LED merupakan sebuah komponen yang menghasilkan cahaya monokromatik ketika diberi tegangan. LED terbuat dari semikonduktor dan perbedaan warna yang dihasilkan disebabkan perbedaan bahan semikonduktor yang digunakan.

Spesifikasi :
- * Superior weather resistance
- * 5mm Round Standard Directivity
- * UV Resistant Eproxy
- * Forward Current (IF): 30mA
- * Forward Voltage (VF): 1.8V to 2.4V
- * Reverse Voltage: 5V
- * Operating Temperature: -30℃ to +85℃
- * Storage Temperature: -40℃ to +100℃
- * Luminous Intensity: 20mcd
Konfigurasi Pin :
- * Pin 1 : Positive terminal of LED
- * Pin 2 : Negative terminal of LED
LDR

Nilai resistansi LDR sangat dipengaruhi oleh intensitas cahaya. Semakin banyak cahaya yang mengenainya, maka semakin menurun nilai resitansinya. Sebaliknya, jika cahaya yang mengenainya sedikit (gelap), maka nilai hambatannya menjadi semakin besar, sehingga arus listrik yang mengalir akan terhambat.
.jpg)
Adapun spesifikasi atau karakteristrik umum dari sensor cahaya LDR adalah sebagai berikut:
1.Tegangan maksimum (DC): 150V
2. Konsumsi arus maksimum: 100mW
3. Tingkatan Resistansi/Tahanan : 10Ω sampai 100KΩ
4. Puncak spektral: 540nm (ukuran gelombang cahaya)
5. Waktu Respon Sensor : 20ms – 30ms
6. Suhu operasi: -30° Celsius – 70° Celcius

LM35

L2993D
Sampai dengan pengetahuan saya pada bulan Januari 2022, saya tidak memiliki informasi spesifik tentang komponen elektronik bernama "L2993D." Kemungkinan besar, ini adalah kesalahan pengetikan atau identifikasi yang kurang tepat. Ada kemungkinan bahwa yang dimaksud adalah L293D, yang merupakan IC (Integrated Circuit) pengendali motor yang populer.
L293D Motor Driver IC:
Dasar-dasar:
Pengendali Motor:
- L293D adalah IC yang dirancang khusus untuk mengendalikan motor DC dan motor stepper.
Jembatan H:
- Memiliki dua set transistor H-jembatan internal yang memungkinkan pengendalian arah dan kecepatan motor.
Input TTL-Compatible:
- Menerima sinyal kontrol dari mikrokontroler atau sumber TTL (Transistor-Transistor Logic).
Proteksi Termal dan Proteksi Overcurrent:
- Dilengkapi dengan perlindungan termal dan perlindungan arus berlebih untuk melindungi chip dari kerusakan.
Tegangan Operasional:
- Biasanya beroperasi pada tegangan rendah hingga menengah (biasanya 4.5V hingga 36V).
Penggunaan Umum:
- Sering digunakan dalam proyek elektronika yang melibatkan kendali motor, seperti robotika, kendaraan otomatis, dan proyek-proyek elektronika DIY lainnya.
Koneksi Dasar:
Motor DC:
- Motor DC dihubungkan ke output motor di chip.
Sinyal Kendali:
- Sinyal kendali (enable, input arah) dihubungkan ke pin yang sesuai pada L293D.
Tegangan Catu Daya Motor (VS):
- Tegangan catu daya motor dihubungkan ke pin VS.
Tegangan Logika (VSS):
- Tegangan logika dihubungkan ke pin VSS.
Referensi GND:
- Ground mikrokontroler dan catu daya motor harus dihubungkan ke pin GND.
Penggunaan Umum:
Kontrol Motor DC:
- L293D digunakan untuk mengendalikan arah putaran dan kecepatan motor DC.
Kontrol Motor Stepper:
- Dapat digunakan untuk mengendalikan motor stepper dengan mengatur urutan dan kecepatan langkahnya.
Proyek Robotika:
- Umumnya digunakan dalam proyek robotika untuk menggerakkan roda atau aktuator lainnya.
Proyek DIY Elektronika:
- Diterapkan dalam proyek-proyek elektronika hobi yang melibatkan kendali motor.
Pastikan untuk merujuk pada lembar data (datasheet) L293D yang dikeluarkan oleh produsen untuk mendapatkan informasi teknis yang lebih rinci, seperti pengaturan pin, spesifikasi listrik, dan parameter operasional lainnya.
ULN2003A
ULN2003A adalah IC (Integrated Circuit) yang biasa digunakan sebagai penguat arus dan pengendali solenoid, stepper motor, atau motor DC dalam aplikasi elektronika. Berikut adalah dasar-dasar teori tentang ULN2003A:
Fitur Utama ULN2003A:
Array Darlington:
- ULN2003A menggunakan konfigurasi Darlington Array, yang merupakan serangkaian transistor Darlington yang dikemas dalam satu chip.
Penguat Arus:
- Berfungsi sebagai penguat arus untuk mengendalikan beban dengan arus tinggi menggunakan sinyal kendali dengan arus rendah.
Solusi Tegangan Tinggi:
- Dirancang untuk menangani tegangan tinggi dan arus tinggi pada beban.
Output Open Collector:
- Setiap saluran keluaran pada ULN2003A menggunakan konfigurasi open collector, yang memungkinkan fleksibilitas dalam mengendalikan beban eksternal.
Proteksi Freewheeling (Flyback Diodes):
- Biasanya terintegrasi dengan dioda flyback internal, yang melindungi transistor dari lonjakan tegangan yang terjadi ketika beban (seperti motor) dimatikan.
Beban Induktif:
- Cocok untuk mengendalikan beban induktif seperti solenoid atau motor stepper.
Koneksi Dasar:
Input Kendali:
- Masukkan sinyal kendali (biasanya dari mikrokontroler atau sumber kontrol lainnya) ke pin input kendali (IN1 hingga IN7).
GND:
- Hubungkan pin GND ULN2003A ke ground (tanah) sistem.
Vcc:
- Hubungkan pin Vcc ULN2003A ke catu daya positif yang diperlukan untuk pengoperasian chip.
Output Keluaran:
- Hubungkan beban eksternal (seperti motor atau solenoid) antara pin keluaran dan sumber daya positif eksternal.
Penggunaan Umum:
Kendali Motor Stepper:
- Digunakan untuk mengendalikan motor stepper dengan mengatur langkah-langkahnya.
Kendali Motor DC:
- Dapat digunakan untuk mengendalikan arah dan kecepatan motor DC.
Kendali Solenoid:
- Sering digunakan untuk mengendalikan solenoid atau aktuator elektromagnetik.
Aplikasi Beban Induktif:
- Cocok untuk mengendalikan beban induktif seperti relay atau solenoid.
Keterangan Penting:
Tegangan dan Arus:
- Perhatikan batasan tegangan dan arus maksimum yang dapat ditangani oleh ULN2003A.
Flyback Diodes:
- Pastikan penggunaan dioda flyback eksternal jika beban adalah beban induktif untuk melindungi transistor dari lonjakan tegangan.
Referensi Datasheet:
- Merujuk pada datasheet ULN2003A dari produsen untuk mendapatkan informasi teknis yang lebih rinci tentang pinout, karakteristik listrik, dan parameter operasional lainnya.
ULN2003A sering digunakan dalam berbagai proyek elektronika dan kendali motorik, dan pemahaman yang baik tentang dasar-dasar teorinya dapat membantu dalam penerapan yang efektif.
Relay
Prinsip Kerja Relay
Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu :
1. Electromagnet (Coil)
2. Armature
3. Switch Contact Point (Saklar)
4. Spring
 Berikut ini merupakan gambar dari bagian-bagian RelayKontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
Berikut ini merupakan gambar dari bagian-bagian RelayKontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :- Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
- Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Apabila Kumparan Coil diberikan arus listrik, maka akan timbul gaya Elektromagnet yang kemudian menarik Armature untuk berpindah dari Posisi sebelumnya (NC) ke posisi baru (NO) sehingga menjadi Saklar yang dapat menghantarkan arus listrik di posisi barunya (NO). Posisi dimana Armature tersebut berada sebelumnya (NC) akan menjadi OPEN atau tidak terhubung. Pada saat tidak dialiri arus listrik, Armature akan kembali lagi ke posisi Awal (NC). Coil yang digunakan oleh Relay untuk menarik Contact Poin ke Posisi Close pada umumnya hanya membutuhkan arus listrik yang relatif kecil.
Arti Pole dan Throw pada Relay
Karena Relay merupakan salah satu jenis dari Saklar, maka istilah Pole dan Throw yang dipakai dalam Saklar juga berlaku pada Relay. Berikut ini adalah penjelasan singkat mengenai Istilah Pole and Throw :
- Pole : Banyaknya Kontak (Contact) yang dimiliki oleh sebuah relay
- Throw : Banyaknya kondisi yang dimiliki oleh sebuah Kontak (Contact)
Berdasarkan penggolongan jumlah Pole dan Throw-nya sebuah relay, maka relay dapat digolongkan menjadi :
- Single Pole Single Throw (SPST) : Relay golongan ini memiliki 4 Terminal, 2 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Single Pole Double Throw (SPDT) : Relay golongan ini memiliki 5 Terminal, 3 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Double Pole Single Throw (DPST) : Relay golongan ini memiliki 6 Terminal, diantaranya 4 Terminal yang terdiri dari 2 Pasang Terminal Saklar sedangkan 2 Terminal lainnya untuk Coil. Relay DPST dapat dijadikan 2 Saklar yang dikendalikan oleh 1 Coil.
- Double Pole Double Throw (DPDT) : Relay golongan ini memiliki Terminal sebanyak 8 Terminal, diantaranya 6 Terminal yang merupakan 2 pasang Relay SPDT yang dikendalikan oleh 1 (single) Coil. Sedangkan 2 Terminal lainnya untuk Coil.
Selain Golongan Relay diatas, terdapat juga Relay-relay yang Pole dan Throw-nya melebihi dari 2 (dua). Misalnya 3PDT (Triple Pole Double Throw) ataupun 4PDT (Four Pole Double Throw) dan lain sebagainya.



a. Prosedur[Kembali]
- Siapkan segala komponen yang di butuhkan
- Susun rangkaian sesuai panduan
- Input codingan arduino
- Hidupkan rangkaian
- Apabila tidak terjadi eror, maka rangkaian selesai dibuat.
b. Handware[Kembali]
c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]
c. Flowchart dan Listing Program[Kembali]
- Flowchart
- Listing Program
d. Video Simulasi[Kembali]
e. Download File[Kembali]
- File HTML klik disini
- File Rangkaian Proteus klik disini
- Code Arduino klik disini
- Video Prinsip Kerja Rangkaian klik disini
- Datasheet Arduino Uno klik disini
- Datasheet Keypad 4x3 klik disini
- Datasheet Vibration Sensor klik disini
- Datasheet PIR Sensor klik disini
- Datasheet Touch Sensor klik disini
- Datasheet Seven Segmen Comon Cathode klik disini
- Library Arduino Uno klik disini
- Library Vibration Sensor klik disini
- Library PIR Sensor klik disini
- Library Touch Sensor klik disini
- Library Keypad klik disini



Tidak ada komentar:
Posting Komentar