- Memahami prinsip dasar input dan output pada mikrokontroler.
- Mampu memahami sistem pengering kerupuk ikan berbasis sensor
- Mampu memahami simulasi proteus yang dihubungkan kedalam proteus
- Power Supply

- Motor DC

- Arduino Uno

- Button

- LDR
.jpg)
- DHT11
.jpg)
.jpg)
- Sensor Touch
.jpg)
- Sensor Infrared
.jpg)
- Sensor Gas
.jpg)
- LM35

- Resistor

- Relay
.jpg)
- ULN2003A

- L2993D

- LED
.jpg)
- Motor DC
Motor terdiri atas 2 bagian utama yaitu stator dan motor. Pada stator terdapat lilitan (winding) atau magnet permanen, sedangkan rotor adalah bagian yang dialiri dengan sumber arus DC. Arus yang melalui medan magnet inilah yang menyebabkan rotor dapat berputar. Arah gaya elektromagnet yang ditimbulkan akibat medan magnet yang dilalui oleh arus dapat ditentukan dengan menggunakan kaidah tangan kanan.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:• Tegangan dinamo : meningkatkan tegangan dinamo akan meningkatkan kecepatan• Arus medan : menurunkan arus medan akan meningkatkan kecepatan.Mekanisme Kerja Motor D
Mekanisme kerja untuk seluruh jenis motor secara umum sama


- Arus listrik dalam medan magnet akan menimbulkan gaya.
- Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran/loop, maka kedua sisi loop yaitu pada sudut kanan medan magnet akan mendapat gaya pada arah yang berlawanan.
- Pasangan gaya menghasilkan torsi untuk memutar kumparan.
- Motor- motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putar yang lebih seragam dari medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan
Resistor
Resistor memiliki nilai resistansi atau hambatan yang berfungsi untuk menghambat dan mengatur arus listrik yang mengalir dalam rangkaian. Resistor memiliki dua pin untuk mengukur tegangan listrik dan arus listrik, dengan resistansi tertentu yang dapat menghasilkan tegangan listrik di antara kedua pin. Nilai tegangan terhadap resistansi berbanding lurus dengan arus yang mengalir.

Spesifikasi: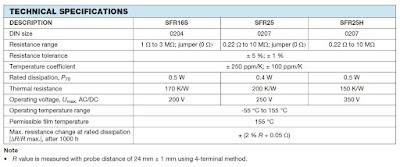




LED
Light Emitting Diode atau LED merupakan sebuah komponen yang menghasilkan cahaya monokromatik ketika diberi tegangan. LED terbuat dari semikonduktor dan perbedaan warna yang dihasilkan disebabkan perbedaan bahan semikonduktor yang digunakan.

Spesifikasi :
- * Superior weather resistance
- * 5mm Round Standard Directivity
- * UV Resistant Eproxy
- * Forward Current (IF): 30mA
- * Forward Voltage (VF): 1.8V to 2.4V
- * Reverse Voltage: 5V
- * Operating Temperature: -30℃ to +85℃
- * Storage Temperature: -40℃ to +100℃
- * Luminous Intensity: 20mcd
Konfigurasi Pin :
- * Pin 1 : Positive terminal of LED
- * Pin 2 : Negative terminal of LED

LM35

.jpeg)
Dapat dilihat bahwa suhu optimal untuk proses pengeringan kerupuk ini adalah dalam rentang 40-50 derajat Celcius. Jika berada pada rentang ini, maka lampu led akan berwarna merah pada alat. Jika lebih dari suhu itu, maka lampu indikator pada alat akan berwarna biru yang mana akibat dari kelebihan suhu adalah membuat kerupuk akan terlalu kering. Dan apabila suhu kurang dari rentang tersebut, maka lampu led yang akan aktif berwarna biru yang mana akibatnya akan berdampak pada tingkat kerupuk yang masih basah.
- Gas Sensor
.jpg)
Konsentrasi gas dalam lingkungan akan mempengaruhi resistansi sensor. Semakin tinggi konsentrasi gas, semakin rendah resistansi, dan sebaliknya.
Spesifikasi Umum:
Rentang Deteksi:
- LPG: 200-10000 ppm
- Propana: 200-10000 ppm
- Metana: 300-10000 ppm
- Karbon Monoksida (CO): 10-1000 ppm
- Asap: 1-1000 mg/m³
- Tegangan operasional biasanya berkisar antara 4-5 V DC
- Referensi:

 Jika terjadi kebocoran gas pada alat, dan kebocoran yang paling memungkinkan akan menimbulkan asap dan CO. yang mana akibat dari sensor ini akan mengaktifkan alarm.
Jika terjadi kebocoran gas pada alat, dan kebocoran yang paling memungkinkan akan menimbulkan asap dan CO. yang mana akibat dari sensor ini akan mengaktifkan alarm.
- IR Sensor
.jpg)
Spesifikasi Umum IR Sensor:
Rentang Gelombang Inframerah:
- Sensor IR biasanya dioptimalkan untuk mendeteksi dalam rentang panjang gelombang tertentu, seperti gelombang panjang (long-wave) atau gelombang pendek (short-wave).
Jarak Operasional:
- Jarak maksimum antara sensor dan objek yang dapat diukur dengan akurat.
Sudut Pemindai (Field of View):
- Sudut di mana sensor dapat mendeteksi radiasi inframerah. Beberapa sensor IR dapat memiliki sudut pemindai yang sempit atau lebar.
Resolusi:
- Beberapa sensor IR dapat memberikan informasi tentang objek di sekitarnya dengan resolusi tertentu, terutama jika digunakan untuk aplikasi seperti sensor suhu inframerah.
Kecepatan Pemindaian:
- Kecepatan di mana sensor dapat memindai area atau mengukur jarak.
Toleransi terhadap Cahaya Lingkungan:
- Kemampuan sensor untuk beroperasi di kondisi pencahayaan lingkungan yang berbeda.
Keluaran Sinyal:
- Sensor IR dapat memberikan keluaran dalam bentuk tegangan analog, pulsa digital, atau protokol komunikasi tertentu, tergantung pada jenis dan modelnya.
Stabilitas dan Akurasi:
- Stabilitas dan akurasi pengukuran sensor selama waktu dan dalam kondisi operasional yang berbeda.
Kemampuan Pendeteksian Objek:
- Beberapa sensor dirancang untuk mendeteksi keberadaan atau pergerakan objek, sementara yang lain dapat memberikan informasi tentang suhu objek.
Daya Listrik:
- Konsumsi daya sensor dan tegangan operasional yang diperlukan.
Ukuran dan Bentuk:
- Ukuran dan bentuk fisik sensor, yang dapat mempengaruhi integrasi dalam sistem atau perangkat tertentu.
Lingkungan Operasional:
- Rentang suhu dan kondisi lingkungan di mana sensor dapat beroperasi dengan baik.
- Touch Sensor
.jpg)
Touch sensor bekerja dengan mendeteksi perubahan kapasitansi atau hambatan listrik saat ada sentuhan. Beberapa jenis touch sensor menggunakan teknologi kapasitif, resistif, atau akustik untuk mendeteksi sentuhan.
Teknologi Kapasitif:
- Touch sensor kapasitif mendeteksi perubahan kapasitansi saat ada sentuhan.
- Sistem ini umumnya menggunakan elektroda yang berada di bawah permukaan sensor atau di sekitarnya. Ketika ada sentuhan, kapasitansi antara elektroda dan objek yang menyentuh berubah.
Teknologi Resistif:
- Touch sensor resistif terdiri dari lapisan tipis yang dapat menyentuh satu sama lain. Sentuhan menyebabkan kontak fisik antara lapisan, menghasilkan perubahan resistansi yang dapat dideteksi.
Teknologi Akustik:
- Beberapa touch sensor menggunakan gelombang suara atau gelombang ultrasonik untuk mendeteksi sentuhan. Sentuhan mempengaruhi pola gelombang, dan perubahan ini dapat dideteksi oleh sensor.
Spesifikasi Umum Touch Sensor:
Sensitivitas:
- Touch sensor harus cukup sensitif untuk mendeteksi sentuhan ringan atau tekanan dengan akurasi.
Tipe Sentuhan:
- Beberapa sensor mendukung sentuhan satu titik (single-touch), sementara yang lain mendukung sentuhan lebih dari satu titik (multi-touch), memungkinkan fungsi gestur.
Resolusi:
- Resolusi mengacu pada sejauh mana sensor dapat mendeteksi atau membedakan antara titik-titik sentuhan.
Kecepatan Respon:
- Kecepatan respon mencerminkan seberapa cepat sensor merespons sentuhan setelah terjadi.
Durabilitas:
- Sensor sentuh harus tahan terhadap keausan dan tahan lama, terutama jika digunakan dalam aplikasi yang melibatkan sentuhan berulang.
Transparansi:
- Jika digunakan pada permukaan layar, penting untuk mempertahankan tingkat transparansi yang memadai.
Ukuran dan Bentuk:
- Ukuran dan bentuk sensor akan bervariasi tergantung pada aplikasi. Beberapa mungkin menjadi bagian dari layar, sementara yang lain dapat berupa sensor eksternal.
Tegangan Operasional:
- Tegangan operasional yang dibutuhkan untuk mengaktifkan sensor.
Suhu Operasional:
- Rentang suhu di mana sensor dapat beroperasi dengan baik.
Kompatibilitas Antarmuka:
- Seberapa baik sensor dapat diintegrasikan dengan perangkat atau sistem lain, seperti mikrokontroler atau komputer.
Lingkungan Operasional:
- Apakah sensor dapat berfungsi dengan baik di lingkungan tertentu, seperti kondisi kelembaban tinggi atau rendah.
Sumber Daya:
- Konsumsi daya yang diperlukan oleh sensor.
- Load Cell Sensor

Strain Gauge: Load cell umumnya dilengkapi dengan strain gauge, yang merupakan perangkat pemantauan tegangan. Strain gauge terbuat dari kawat logam tipis yang dipasang pada permukaan load cell. Ketika load cell menerima beban atau gaya, terjadi perubahan dimensi pada bahan load cell, dan ini menyebabkan perubahan panjang atau regangan pada strain gauge.
Regangan (Strain): Beban atau gaya yang diterapkan pada load cell menyebabkan regangan pada bahan load cell. Regangan ini menyebabkan perubahan panjang atau deformasi pada strain gauge.
Perubahan Resistansi: Ketika strain gauge mengalami deformasi, resistansinya berubah. Strain gauge dirancang sedemikian rupa sehingga perubahan resistansinya proporsional dengan regangan yang dialami. Jika beban bertambah, regangan dan perubahan resistansi juga akan bertambah.
Wheatstone Bridge: Load cell biasanya terdiri dari beberapa strain gauge yang disusun dalam suatu konfigurasi yang disebut Wheatstone Bridge. Ini adalah rangkaian resistor yang terdiri dari empat resistansi, di mana dua resistansi berubah saat load cell menerima beban, sementara dua resistansi lainnya tetap konstan.
Sinyal Output: Perubahan resistansi pada Wheatstone Bridge menghasilkan perubahan tegangan output. Output ini dapat diukur dan dikonversi menjadi nilai beban atau gaya yang diterapkan pada load cell menggunakan elektronika pengolah sinyal.
Konversi dan Pemrosesan Sinyal: Tegangan output dari load cell diukur dan diubah menjadi nilai beban yang dapat dimengerti oleh perangkat pembaca atau kontrol, seperti indikator berat atau sistem pengendalian otomatis.
- Referensi :


- Dapat dilihat pada referensi diatas, bahwa kapasitas seluruh loyang adalah 25Kg. Dimana dengan kadar air maksimal yang akan hilang adalah 40%.


- HX711
.jpeg)
HX711 adalah IC (Integrated Circuit) pengukuran berat yang sering digunakan dengan load cell untuk mengukur beban atau berat. Prinsip kerja HX711 melibatkan pengukuran perubahan tegangan yang dihasilkan oleh load cell dan konversi nilai tersebut menjadi data digital yang dapat dibaca oleh mikrokontroler atau perangkat pengukuran berat.
Berikut adalah prinsip kerja HX711:
Amplifikasi Sinyal:
HX711 memiliki penguat sinyal internal yang mampu menguatkan sinyal output dari load cell. Load cell menghasilkan sinyal tegangan yang sangat kecil sebagai respons terhadap beban yang diterapkan. Penguat sinyal pada HX711 membantu meningkatkan amplitudo sinyal ini sehingga dapat diukur dengan lebih baik.
Differential Input:
HX711 menggunakan konfigurasi input diferensial. Ini berarti ia membandingkan perbedaan tegangan antara dua saluran input dari load cell. Konfigurasi ini membantu mengurangi pengaruh noise atau interferensi eksternal pada sinyal.
ADC (Analog-to-Digital Converter):
HX711 dilengkapi dengan ADC 24-bit (analog-to-digital converter). ADC ini mengubah sinyal analog dari load cell menjadi data digital dengan resolusi tinggi. Resolusi 24-bit memungkinkan pengukuran yang sangat akurat.
Filtering dan Stabilisasi:
HX711 memiliki fitur filtering dan stabilisasi yang membantu menghilangkan noise atau fluktuasi yang dapat mempengaruhi akurasi pengukuran. Ini memastikan bahwa data yang dihasilkan stabil dan dapat diandalkan.
Komunikasi Serial:
HX711 menggunakan antarmuka komunikasi serial untuk mentransfer data digital ke mikrokontroler atau perangkat pengukuran berat lainnya. Protokol komunikasi umumnya melibatkan pengaturan saluran input dan permintaan data.
Referensi Tegangan Internal:
HX711 memiliki sumber tegangan referensi internal yang digunakan untuk mengukur tegangan output dari load cell. Hal ini membantu meningkatkan akurasi pengukuran.
Calibration:
HX711 dapat dikalibrasi untuk menghasilkan pembacaan yang akurat. Ini melibatkan mengukur nilai referensi dengan bobot yang diketahui dan mengonfigurasi HX711 agar memberikan hasil yang sesuai.
- Relay
.jpeg)
HX711 adalah IC (Integrated Circuit) pengukuran berat yang sering digunakan dengan load cell untuk mengukur beban atau berat. Prinsip kerja HX711 melibatkan pengukuran perubahan tegangan yang dihasilkan oleh load cell dan konversi nilai tersebut menjadi data digital yang dapat dibaca oleh mikrokontroler atau perangkat pengukuran berat.
Berikut adalah prinsip kerja HX711:
Amplifikasi Sinyal: HX711 memiliki penguat sinyal internal yang mampu menguatkan sinyal output dari load cell. Load cell menghasilkan sinyal tegangan yang sangat kecil sebagai respons terhadap beban yang diterapkan. Penguat sinyal pada HX711 membantu meningkatkan amplitudo sinyal ini sehingga dapat diukur dengan lebih baik.
Differential Input: HX711 menggunakan konfigurasi input diferensial. Ini berarti ia membandingkan perbedaan tegangan antara dua saluran input dari load cell. Konfigurasi ini membantu mengurangi pengaruh noise atau interferensi eksternal pada sinyal.
ADC (Analog-to-Digital Converter): HX711 dilengkapi dengan ADC 24-bit (analog-to-digital converter). ADC ini mengubah sinyal analog dari load cell menjadi data digital dengan resolusi tinggi. Resolusi 24-bit memungkinkan pengukuran yang sangat akurat.
Filtering dan Stabilisasi: HX711 memiliki fitur filtering dan stabilisasi yang membantu menghilangkan noise atau fluktuasi yang dapat mempengaruhi akurasi pengukuran. Ini memastikan bahwa data yang dihasilkan stabil dan dapat diandalkan.
Komunikasi Serial: HX711 menggunakan antarmuka komunikasi serial untuk mentransfer data digital ke mikrokontroler atau perangkat pengukuran berat lainnya. Protokol komunikasi umumnya melibatkan pengaturan saluran input dan permintaan data.
Referensi Tegangan Internal: HX711 memiliki sumber tegangan referensi internal yang digunakan untuk mengukur tegangan output dari load cell. Hal ini membantu meningkatkan akurasi pengukuran.
Calibration: HX711 dapat dikalibrasi untuk menghasilkan pembacaan yang akurat. Ini melibatkan mengukur nilai referensi dengan bobot yang diketahui dan mengonfigurasi HX711 agar memberikan hasil yang sesuai.
Prinsip Kerja Relay
Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu :
1. Electromagnet (Coil)
2. Armature
3. Switch Contact Point (Saklar)
4. Spring
 Berikut ini merupakan gambar dari bagian-bagian RelayKontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
Berikut ini merupakan gambar dari bagian-bagian RelayKontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :- Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
- Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Apabila Kumparan Coil diberikan arus listrik, maka akan timbul gaya Elektromagnet yang kemudian menarik Armature untuk berpindah dari Posisi sebelumnya (NC) ke posisi baru (NO) sehingga menjadi Saklar yang dapat menghantarkan arus listrik di posisi barunya (NO). Posisi dimana Armature tersebut berada sebelumnya (NC) akan menjadi OPEN atau tidak terhubung. Pada saat tidak dialiri arus listrik, Armature akan kembali lagi ke posisi Awal (NC). Coil yang digunakan oleh Relay untuk menarik Contact Poin ke Posisi Close pada umumnya hanya membutuhkan arus listrik yang relatif kecil.
Arti Pole dan Throw pada Relay
Karena Relay merupakan salah satu jenis dari Saklar, maka istilah Pole dan Throw yang dipakai dalam Saklar juga berlaku pada Relay. Berikut ini adalah penjelasan singkat mengenai Istilah Pole and Throw :
- Pole : Banyaknya Kontak (Contact) yang dimiliki oleh sebuah relay
- Throw : Banyaknya kondisi yang dimiliki oleh sebuah Kontak (Contact)
Berdasarkan penggolongan jumlah Pole dan Throw-nya sebuah relay, maka relay dapat digolongkan menjadi :
- Single Pole Single Throw (SPST) : Relay golongan ini memiliki 4 Terminal, 2 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Single Pole Double Throw (SPDT) : Relay golongan ini memiliki 5 Terminal, 3 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Double Pole Single Throw (DPST) : Relay golongan ini memiliki 6 Terminal, diantaranya 4 Terminal yang terdiri dari 2 Pasang Terminal Saklar sedangkan 2 Terminal lainnya untuk Coil. Relay DPST dapat dijadikan 2 Saklar yang dikendalikan oleh 1 Coil.
- Double Pole Double Throw (DPDT) : Relay golongan ini memiliki Terminal sebanyak 8 Terminal, diantaranya 6 Terminal yang merupakan 2 pasang Relay SPDT yang dikendalikan oleh 1 (single) Coil. Sedangkan 2 Terminal lainnya untuk Coil.
Selain Golongan Relay diatas, terdapat juga Relay-relay yang Pole dan Throw-nya melebihi dari 2 (dua). Misalnya 3PDT (Triple Pole Double Throw) ataupun 4PDT (Four Pole Double Throw) dan lain sebagainya.



a. Prosedur[Kembali]
- Siapkan segala komponen yang di butuhkan
- Susun rangkaian sesuai panduan
- Input codingan arduino
- Hidupkan rangkaian
- Apabila tidak terjadi eror, maka rangkaian selesai dibuat.
b. Handware[Kembali]

c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]
.png)
c. Flowchart dan Listing Program[Kembali]
- Flowchart
.png)
- Listing Program
d. Video Simulasi[Kembali]
- Video Rangkaian
- Video Flowchart
e. Download File[Kembali]
- File HTML klik disini
- File Flowchart klik disini
- Download Video Rangkaian klik disini
- File Rangkaian Proteus klik disini
- Code Arduino klik disini
- Video Prinsip Kerja Rangkaian klik disini
- Datasheet Arduino Uno klik disini
- Datasheet IR Sensor klik disini
- Datasheet Gas Sensor klik disini
- Datasheet Touch Sensor klik disini
- Library Arduino Uno klik disini
- Library IR Sensor klik disini
- Library Gas Sensor klik disini
- Library Touch Sensor klik disini



Tidak ada komentar:
Posting Komentar